At Philadelphia!Attending AAAI and MAPF Workshop
Present my poster at AAAI conference!
(he/him)
Robotics Researcher
I am a senior undergraduate student at South China University of Technology, majoring in Robotics Engineering. I am currently visiting Carnegie Mellon University as a Robotics Researcher affiliated with the Robotics Institute.
I am working on Cross-Embodiment Robot learning at the CMU Safe AI Lab with Yaru Niu and Prof. Ding Zhao, Planning and Multi-Robot Coordination at the CMU ARCS Lab with Yorai Shaoul, Jintian Yan and Prof. Jiaoyang Li. Previously, I worked with Prof. Zhongqiang Ren at the SJTU RAP Lab, where we did projects in Multi-Robot Path Planning and collaborated with Prof. Sven Koenig at the UCI & USC IDM Lab.
I am actively seeking a Ph.D. position beginning in Fall 2026 !! Please find below a short summary of my research interests. Feel free to email me if you are interested.
Visiting Researcher
Carnegie Mellon University
Exchange Student
University of California, Berkeley
Undergraduate Student
South China University of Technology
Note: Due to space constraints, the following is a condensed summary. For detailed insights from past projects and comprehensive future research plans (envisioned to span 5+ years with flexibility to adapt), please contact me for my full application package or Statement of Purpose.
Short Summary:
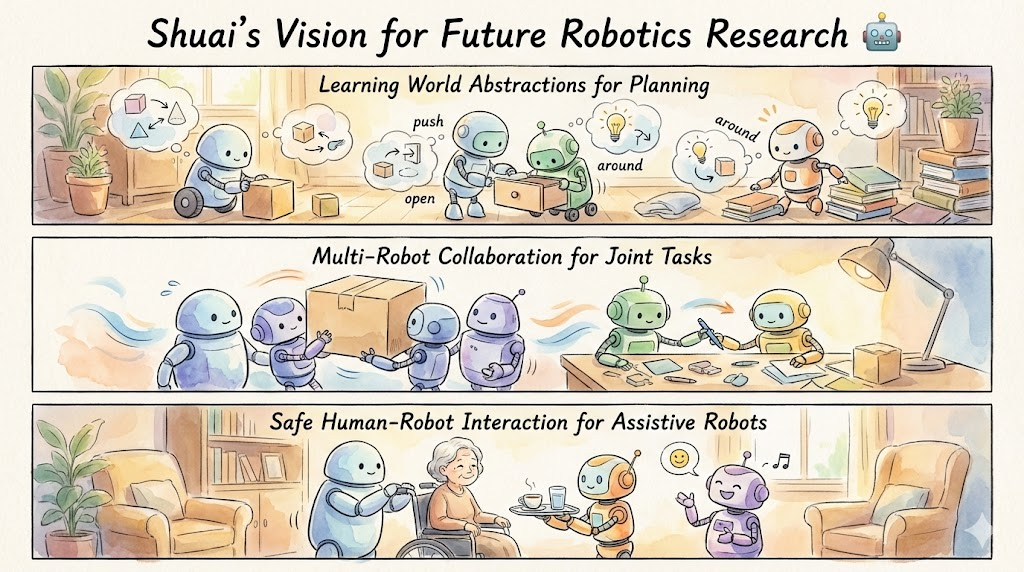
My research goal is to develop next-generation decision-making frameworks that unify planning with learning world abstractions. Building on it, I aim to enable multi-robot collaboration on tasks beyond single-robot capabilities and, ultimately, integrate safe human-robot interaction to deploy such systems as assistive robots for people with disabilities. This vision was gradually formed during my undergraduate research, which involved four projects that I led or co-led at four labs. Roughly, they are structured into three components: Planning, Robot Learning and Multi-Robot Systems.

Previous Experience:
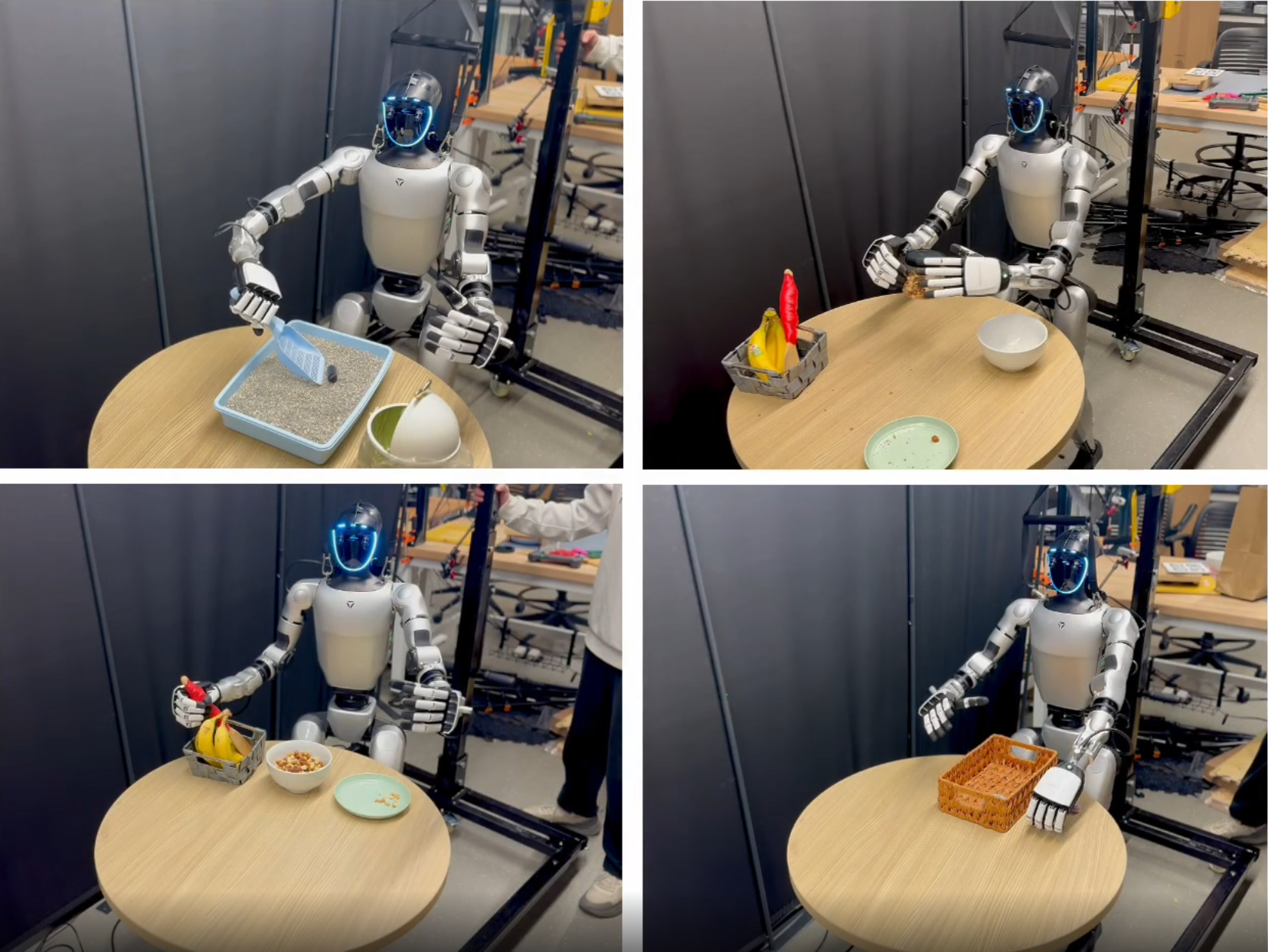
My ongoing projects respectively focus on learning generalizable manipulation policies across diverse robotic embodiments like G1 Humanoids, Go1 Quadrupeds and bimanual robot arms (CMU Safe AI Lab) , and designing collaborative Multi-robot Task and Motion Planning (TAMP) with flow-matching (CMU ARCS Lab). My previous projects were about heuristic search and multi-robot motion planning (SJTU RAP Lab & UCI IDM Lab), bridging the gap between planning and real-world execution with algorithms that account for practical constraints (CMU ARCS Lab). Some of my works on handling robots with heterogeneous speeds are published (AAAI 2025, SoCS 2025), and others on solving time-sensitive task allocation with kinematic constraints are under review.
Looking Forward:
I like how planning explores the state space with human-prior intelligence, as well as the learning strategies for their efficiency in indescribable modeling. However, they respectively fail in certain scenarios, such as handling unknown worlds, long-term task decomposition and reasoning, and synchronized collaboration across embodiments. This encourages me to unify them. Following my long-standing personal interest and conviction that robots should exist naturally in our daily lives, I envision extending these capabilities toward human-robot interaction. When robots possess sufficient general competence, they should intelligently reason about implicit human values and preferences, going beyond merely collision-free safety to achieve truly empathetic and context-aware interaction. My ultimate aspiration is to develop assistive robots that seamlessly integrate into our lives, bringing warmth and support to people, much like Baymax. To achieve this, I plan to draw upon prior work in planning, multi-agent systems, robot learning, cognitive science, and human–robot interaction. I’m not an expert on everything, but I’m always excited to learn. Please drop me an email if you’re interested, we could collaborate on some exciting projects!
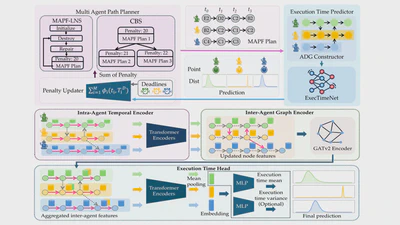
The Multi-Agent Path Finding (MAPF) problem aims to find collision-free paths for multiple agents while optimizing objectives such as the sum of costs or makespan. MAPF has wide …
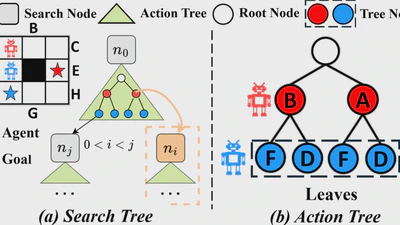
Multi-Agent Path Finding (MAPF) seeks collision-free paths for multiple agents from their respective starting locations to their respective goal locations while minimizing path …
Multi-Agent Path Finding (MAPF) seeks collision-free paths for multiple agents from their respective starting locations to their respective goal locations while minimizing path …
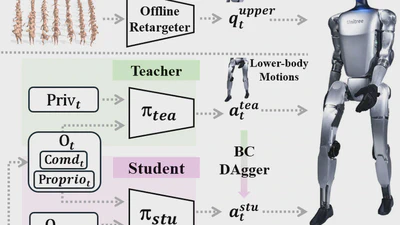
A two-stage learning pipeline for humanoid robot locomotion: Teacher Policy (RL) trained with privileged information in simulation, and Student Policy (IL) distilled from teacher …
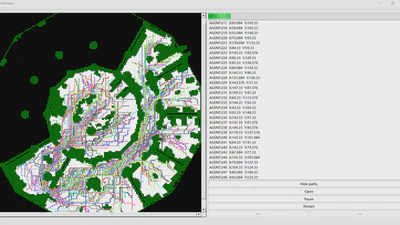
A Qt-based visualizer for Continuous Multi-Agent Path Finding (MAPF) algorithms. Renders agent movements with smooth trajectories in continuous 2D space.
Present my poster at AAAI conference!
See u in Pittsburgh!
My first, first-author paper is accepted by AAAI 2025!
