G1 Humanoid Whole-Body Controller
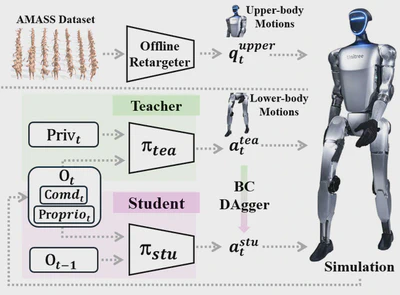
A two-stage learning pipeline for humanoid robot locomotion: Teacher Policy (RL) trained with privileged information in simulation, and Student Policy (IL) distilled from teacher …
I had some fun doing them.
A two-stage learning pipeline for humanoid robot locomotion: Teacher Policy (RL) trained with privileged information in simulation, and Student Policy (IL) distilled from teacher …

A Qt-based visualizer for Continuous Multi-Agent Path Finding (MAPF) algorithms. Renders agent movements with smooth trajectories in continuous 2D space.